White fast movers (WFM) seemingly occur all over the world, and certainly in Europe and North America. The abundance of unintentionally captured WFM footage in many drone videos indicates that WFM are not a rare phenomenon. Malin Oloier wrote in a discussion about his WFM footage that he has No idea what those are, I have around 10-15 similar footage from 100 to 300m altitude, more or less visible. (P-iFx3VIiQ0, April 2018) Vinnie Barbarino wrote that he has caught these before with a different drone and camera as well. (NQVkkWvTaZY, May 2018)
WFM cannot only be captured via drones from above, but also from below if the contrast to a blue sky or very dark clouds is sufficient.
Step 1: Stationary and Continuous Multi-Camera Tracking
All relevant problems of tracking WFM's movement patterns precisely can be solved by installing two or more cameras simultaneously focusing on the same field of view. Due to the different angle towards an object, its movement and distance can precisely be calculated employing similar techniques that our brain uses based on the signal from our two eyes. The cameras need to be technically very capable, meaning that they have to provide a sufficiently high resolution and short shutter time, as well as a high framerate.
The equipment must be installed on an elevated position with nearby weather resistent space and eletricity supply. I start the development of a WFM observatory with a rooftop installation. More elevated places like wind turbines, electricity towers or construction cranes are even more suitable to gather information about what flies over the highest trees and buldings in the area. A computer program (see below) helps to detect small white objects in the frame. False positives like doves, airplanes, insects close to the lens can be sorted out manually, if an AI solution turns out as hardly feasible. This is a time and cost efficient way to gather good data about WFMs in visible light. The following picture illustrates the setup.
My assumption is that WFMs occur everywhere in Europe, North America and other places. If the specific location of my first measurement turns out to not provide sufficient results, further analysis of drone footage or own field tests might be necessary to gain more information about the locations of general WFM occurrences.
Step 2: Further Measurements to Test for WFMs' Characteristics
If measurements from step 1 provide a validation of the crucial visual properties of WFMs, then I am going to measure further properties of the phenomenon. My assumptions are validated if I find strong evidence that:
WFMs occur as a common phenomenon in the surveyed area, and
WFMs move with up to several hundred kilometers per hour or even with supersonic speed,
Candidates for further measurable properties include the following:
Emission or reflection of non-visible light (i.e. infrared, ultraviolet)
Emission or reflection of other electromagnetic waves than visible light (e.g. radio waves)
Figure 2 shows a list of measurements that were established for the investigation of the Hessdalen lights, which is an illumination phenomenon in a very specific area in Norway.
Fig 2. Measurement setup for the Hessdalen technical report (E. Strand 1984).
My Observatory
I built the first WFM observatory on the roof of a three story building in North-West Germany. Three cameras observe an area of the sky during the day, and a dedicated server analyzes the captured footage for small moving objects during the night. Figure 5 shows the weather-protected cameras.
Fig 5. Rooftop camera installation. Both cameras focus on the same field of view shown in figure 6.
I choose the following soft- and hardware solutions. I only mention the most crucial parts.
Camera: Sony Exmor R IMX179 (backlit, not stacked) with lense and aperture
Figure 6 illustrates the analysis routine for captured footage. The underlying scene includes dark birds and the trees' movement caused by wind. A WFM would occur as a white trail of numbers.
Fig 6. Five consecutive frames of a 10-minute long sample scene with markers for detected movements, and a final report of these movements. Black/white numbers denote the frame in which a dark/light object was detected. (reduced to 256 colors and 249x600 pixels, click for full scale view) The black trails are produced by birds flying through the image during the 10-minute capture session.
Appendix
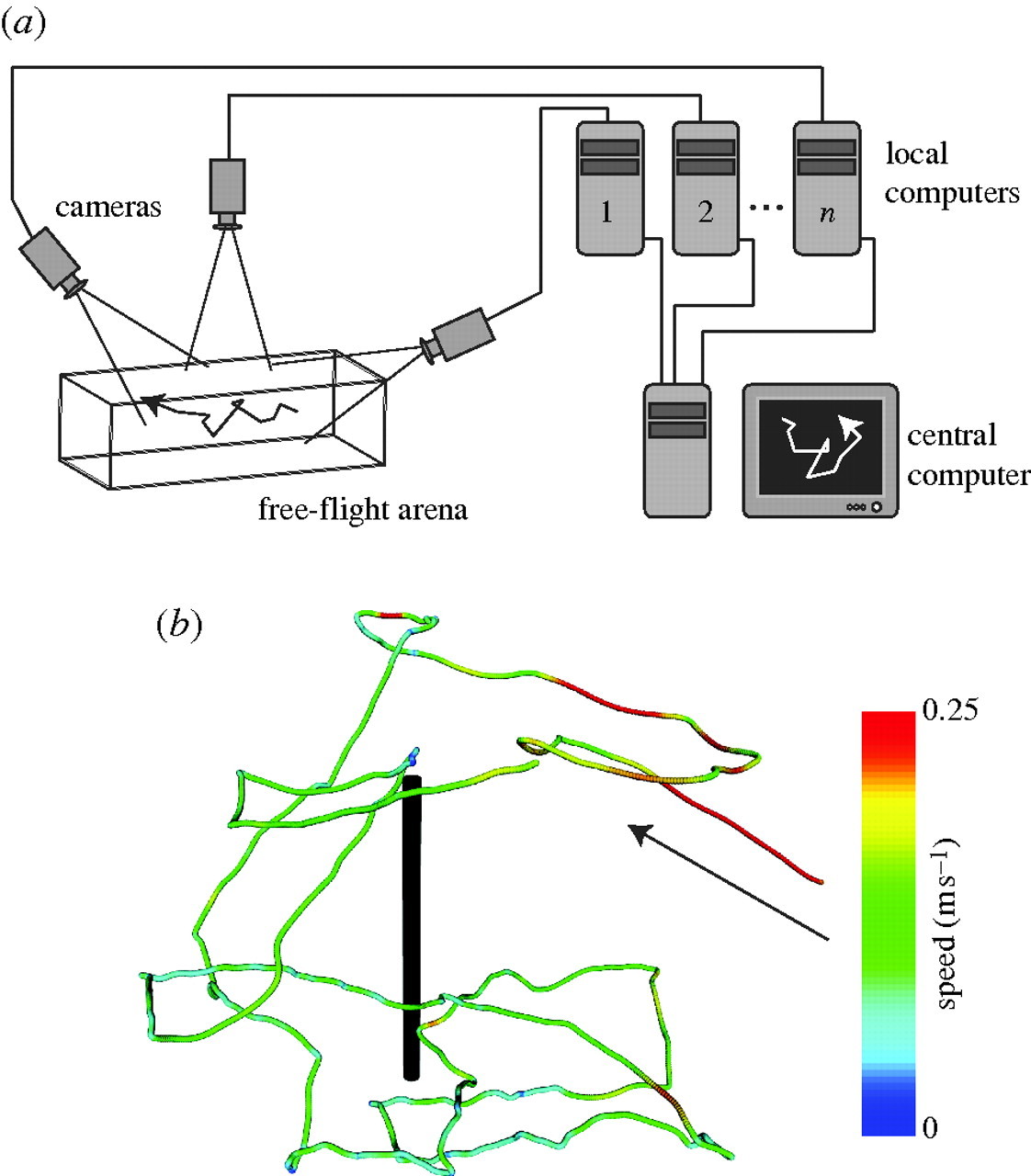
For comparison, calculating a three-dimensional path out of three camera streams was conducted by Straw et al. (2011). Figure 7 shows their technical setup.
Fig 6. From Straw et al. (2011): (a) Schematic of the multi-camera tracking system. (b) A trajectory of a fly (Drosophila melanogaster) near a dark, vertical post. Arrow indicates direction of flight at onset of tracking.
Collins (2007) provides a good introduction into computer vision vision. Parker (2016) provides further academic background regarding human stereoscopic vision.
This page will be updated with all upcoming mayor news about the realisation of the measurement stations.
References
Collins, R. (2007). Introduction to Computer Vision. Fall 2007 Lecture Notes, CSE Department, Penn State University. cse.psu.edu/~rtc12/CSE486/
Parker, A. (2016). Vision in our three-dimensional world. Philosophical Transactions of The Royal Society: B Biological Sciences, 371(1697): 20150251. 10.1098/rstb.2015.0251
Straw, A., Branson, K., Neumann, T. and Dickinson, M. (2011). Multi-camera real-time three-dimensional tracking of multiple flying animals. Journal of the Royal Society, 8:395-409. 10.1098/rsif.2010.0230






 Fig 2. Measurement setup for the Hessdalen technical report (
Fig 2. Measurement setup for the Hessdalen technical report (